





0592-5758917
Download
Solution
About us
Understand the latest technical information
Please enter the download center

Products
News
Contact
Service Hotline
Page copyright © 2018 Winservo (Xiamen) Electrical Technology Co., Ltd. 闽ICP备2021015213号-1 Website construction:300.cn



SOLUTION

Paper machine
The object required by the equipment:
1 mediocre 60 PLC plus 4 expansion modules: programming control action and frequency converter control;
4 mediocre belt motion control function servo:
2 special servo control hook (2.3KW 130ST-15015) [mechanical structure is not the same as this is 60ST-01330 2]
1 universal servo control flying head (130ST-4025)
1 special servo control base paper feed (180ST-3515)
9: inverter control host, lift, pressure, press, Feida, pre stack, lift the end of the paper, paper pre stack.
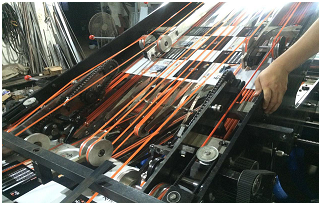
Chain type servo
Hook servo function: hook servo has two block to block the turtle, paper, and bottom paper form alignment function. Every piece of paper to start a chain type cam cycle.
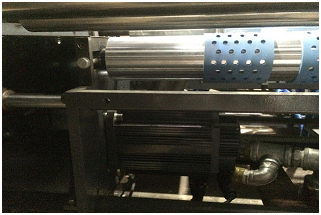
Base paper servo
The function of the base paper servo: conveying the base paper material, when there is a paper signal, start the base paper servo, send a sheet of paper and work all the time.
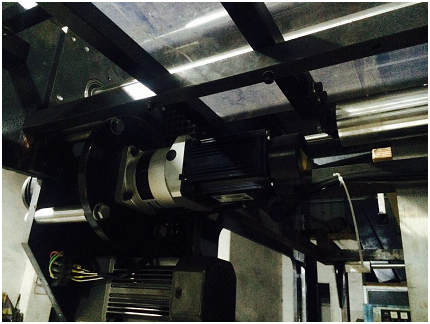
Feida servo
Feida servo function is used to control Feida head work, so that Feida head can deliver the surface paper according to the set material length and distance, and fly to the top to turn a circle to transport a tissue paper.
Servo debugging needs to pay attention to:
Sometimes the mechanical parameters of the customers are not necessarily correct, and the correct number of 1M pulses can be obtained by measuring the actual paper length and spacing according to the PN202 formula.
The length of paper length + gap is not less than 700MM, and the gap is not less than 200MM.
Hook PN222 Queliao alarm, 0 off 1 start.
A hook, servo
1. tissue signal frame servo does not start.
Solution: PN213 wait distance can not be set to 0 without waiting for start, set to 1.
Press the paper 2. hook the turtle block.
Solution: to set the offset distance back to the original, according to the actual situation to the appropriate position, because the turtle has a hook under the same speed, can not be adjusted to too high, otherwise it will block the bottom paper transmission.
3. the paper overlapped at the bottom of the paper.
Solution: the hook servo synchronization area distance increases.
The 4. hook is a symmetrical one, running or jogging can make the reverse, or may damage the turtle block.
The 5. paper is fast, reducing the acceleration distance and increasing the synchronous distance; and vice versa.
Two, bottom paper servo
1. of the paper is fast, running over the turtle.
Solution: increase the length of the base paper servo, and vice versa.
Three, Feida servo
The 1. Feida head has pulse interference.
Solution: connect the shielded line to the ground.
2. Feida servo PN202 calculation method: the spindle runs a unit length distance, the flying head turns one circle.
PN202=70000*1000/ (spindle 1M pulse number * (paper length + gap)), of which 70000 is the number of pulses needed for the servo to turn to the 1 lap, and there is a 1:7 reducer. The 1000 value is the default value of PN203.